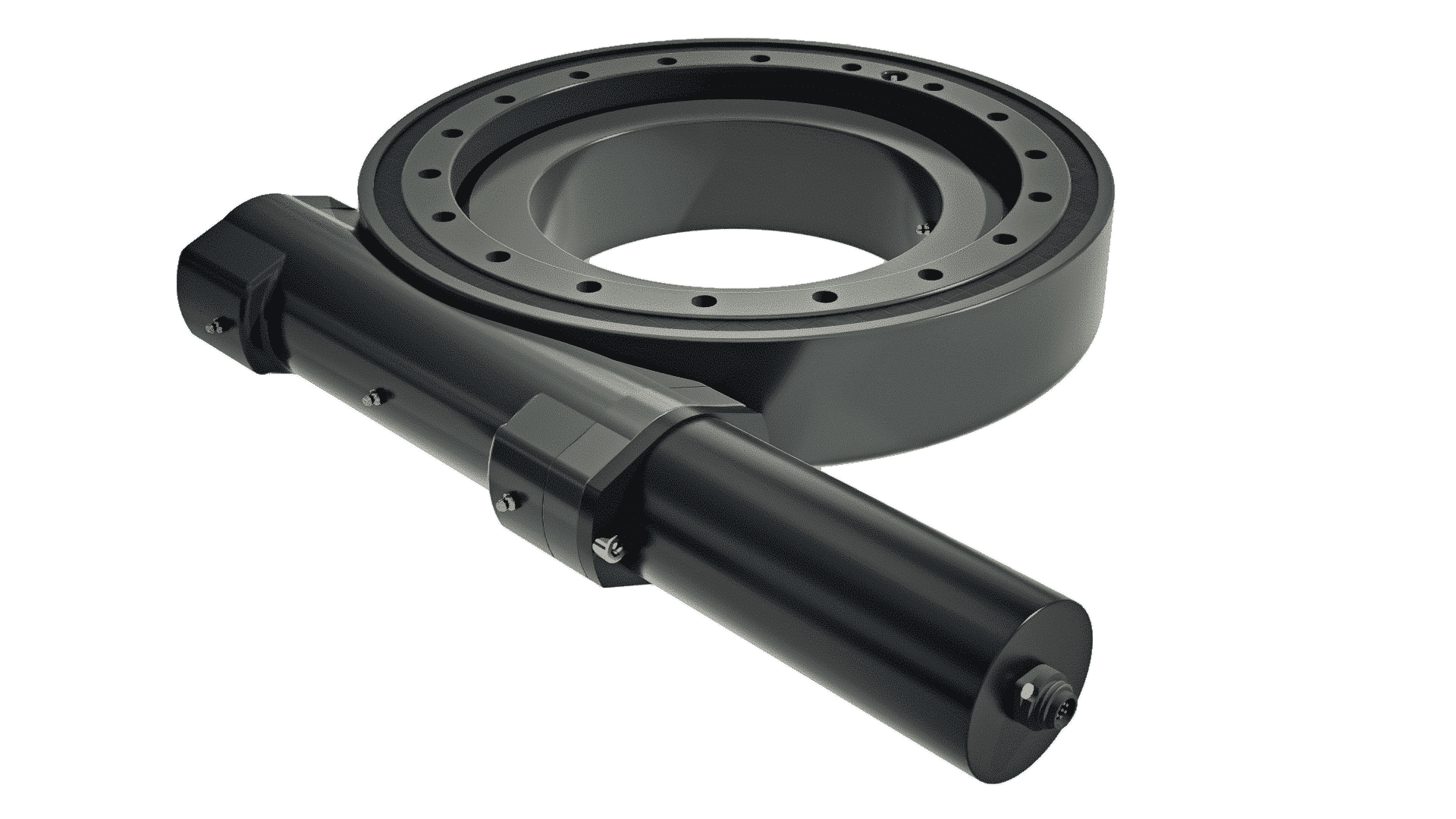
Leichte Baureihe
Einsatzbereiche sind trockene und saubere Umgebungen, wie Werkshallen, Reinräume oder Roboterkabinen

Schwere Baureihe
Robustere Bauweise für z.B. Kräne oder Windkraftanlagen. Besonders für hohe Traglasten und Kippmomente geeignet
Extreme Baureihe
Einsetzbar in maritimen Bedingungen. Die verbesserte Umweltdichtung ermöglicht auch den Einsatz im Salznebel
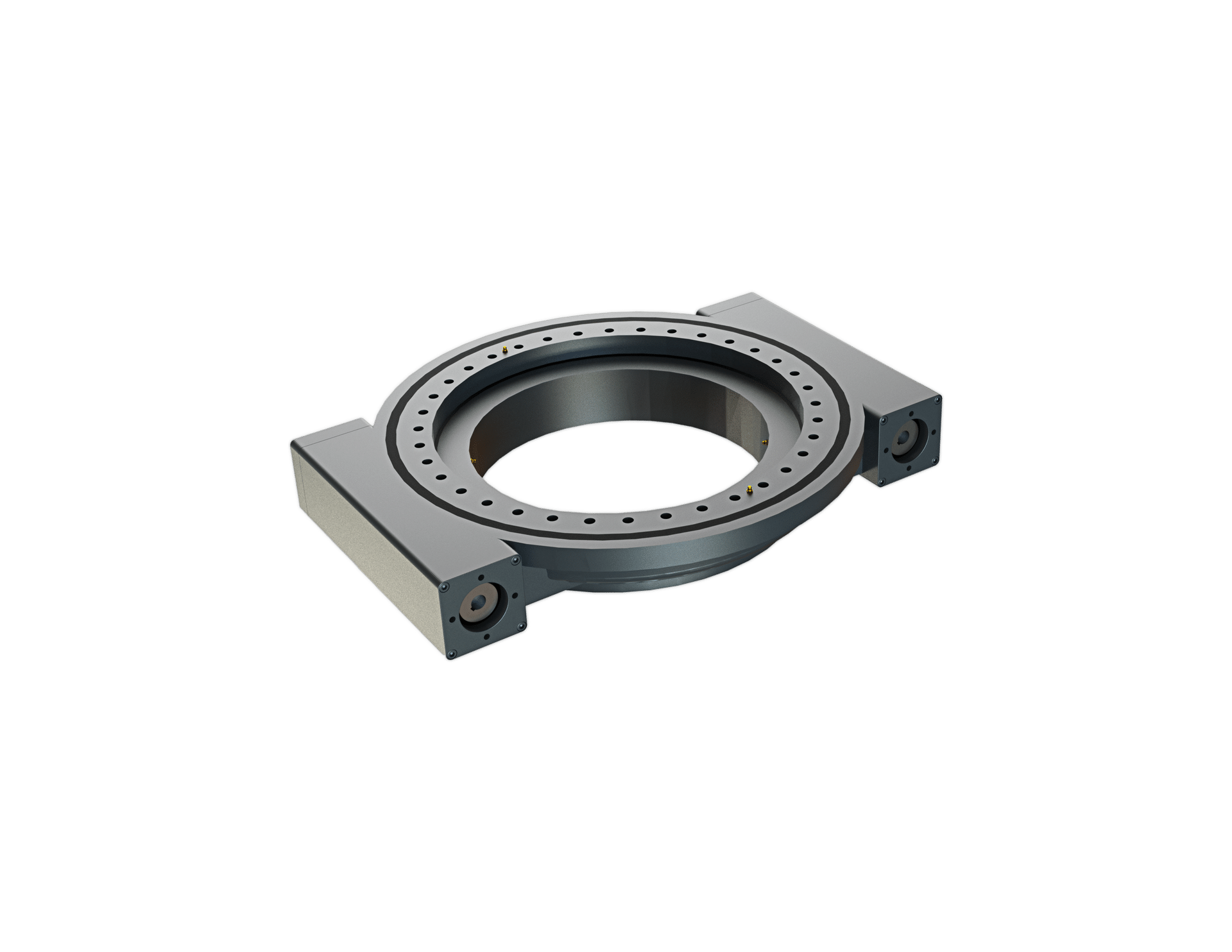
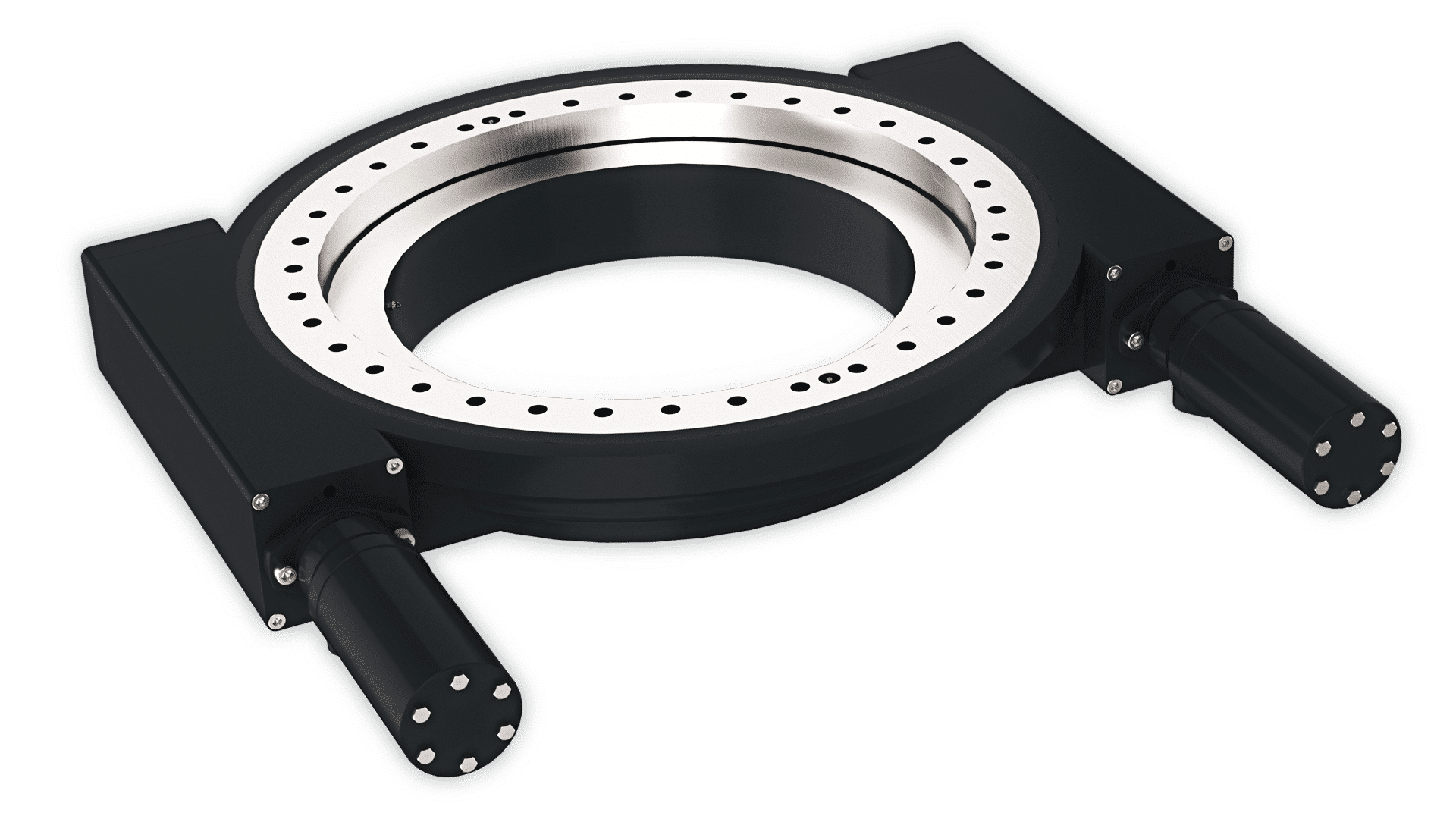
2 Schnecken
2 Schnecken für höheres Drehmoment und Haltemoment. Einsetzbar in Forstanwendungen
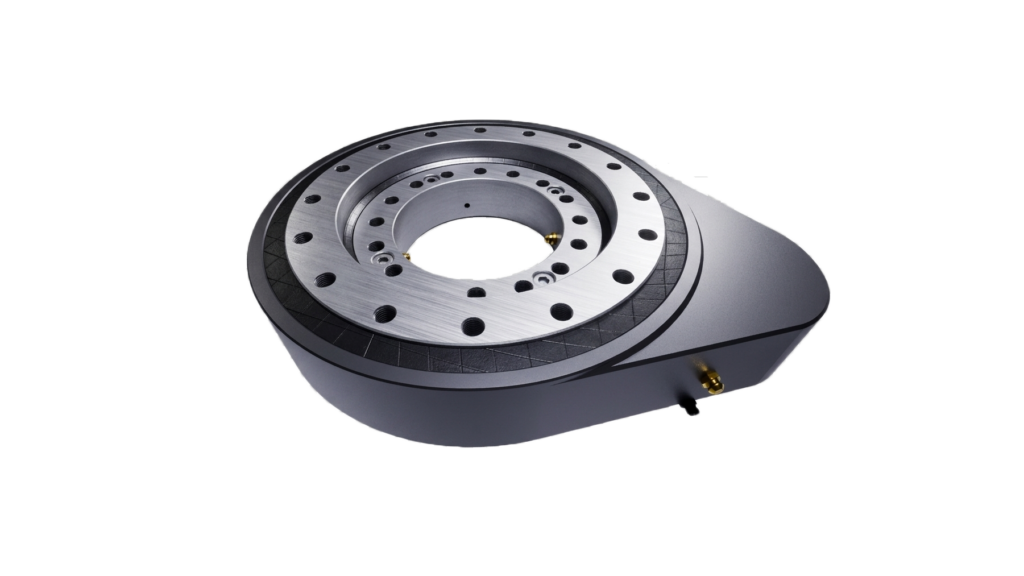
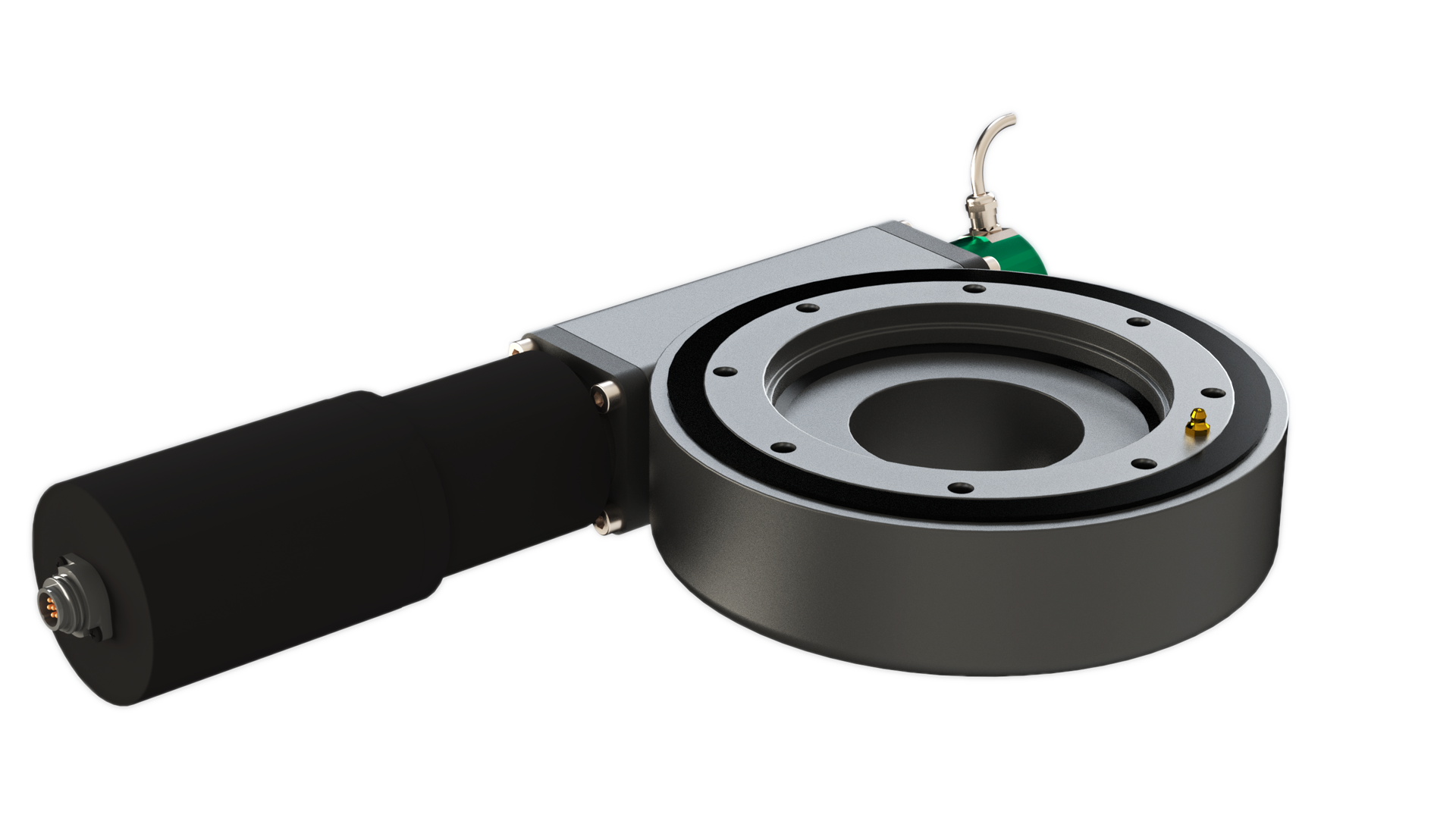
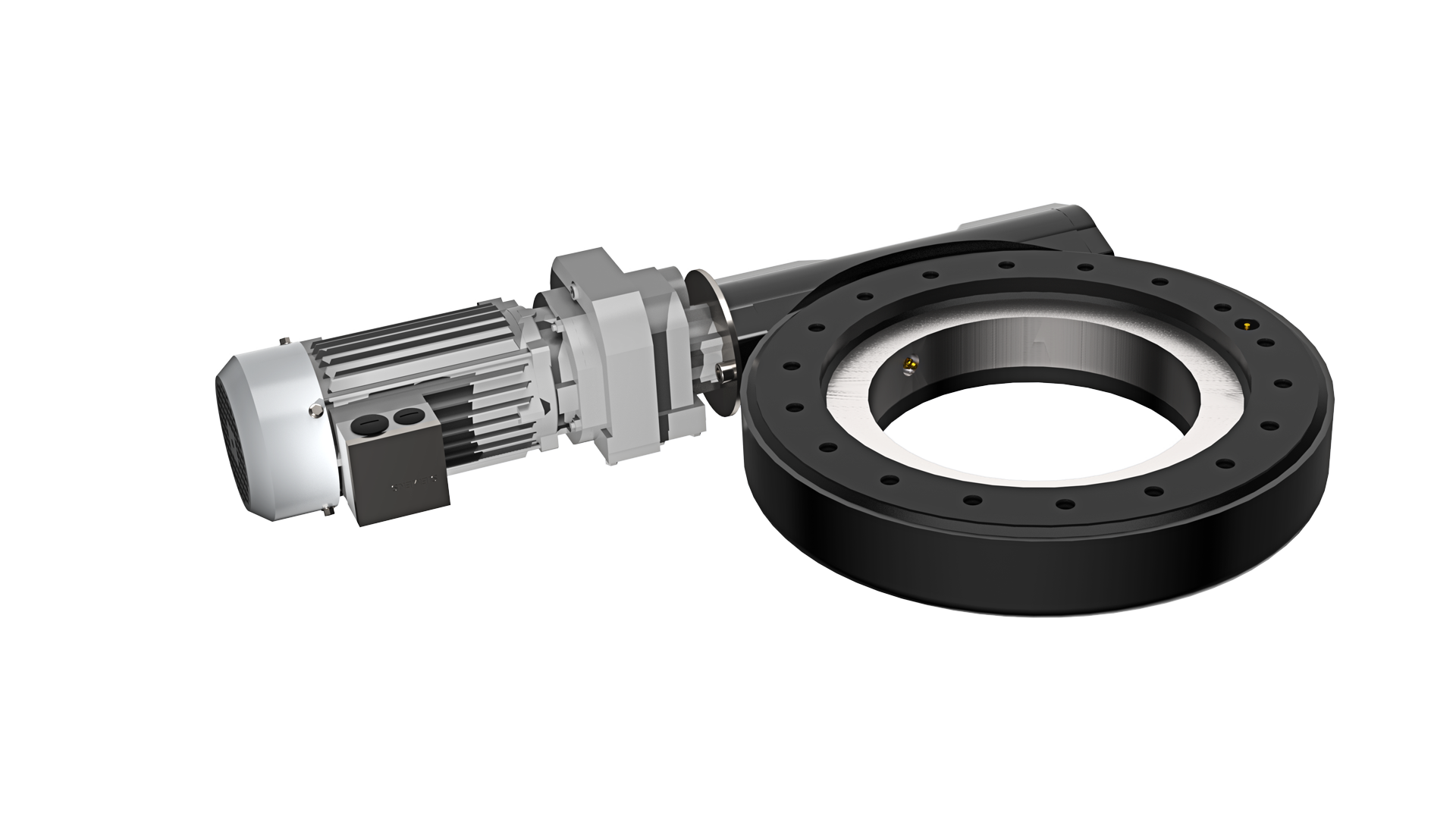
Schnelllaufende Baureihe
Stirnradgetriebe mit höherer Drehzahl von 15 U/min im Dauerbetrieb und axialem Anschluss

ASR Schwenkrotatoren
Konfigurierbares Komplettsystem zur 360° Rotation für Bagger bis 60 Tonnen als Direktanbau oder Sandwich Bauweise

24V Systeme
Präzise Führungsschienen in verschiedenen Breiten und Längen bis 3 m für zuverlässige lineare Bewegungen
24V Solarsysteme
Robuste Führungswagen für präzise und leichtgängige Linearführungen mit hoher Belastbarkeit in Flansch Bauweise
400V Systeme
Robuste Führungswagen für präzise und leichtgängige Linearführungen mit hoher Belastbarkeit in Flansch Bauweise
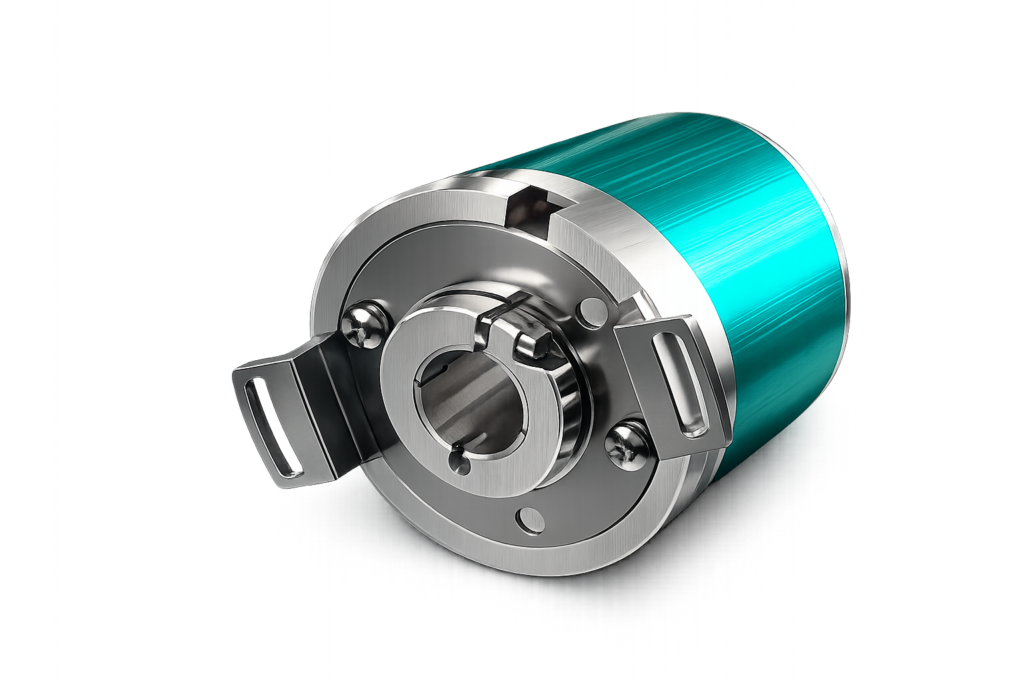
Absolutwertgeber
Multiturn Absolutwertgeber für höchste Präzision zur Positionierung

Drehdurchführungen
Mit bis zu 8 Kanälen in allen gängigen Anschlussgrößen
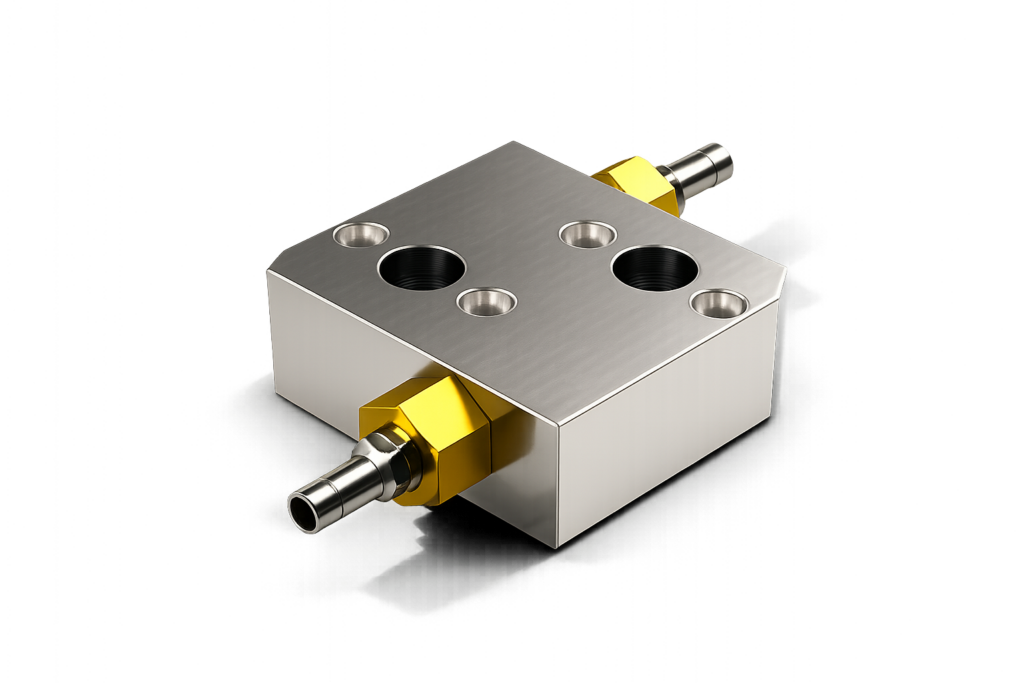
Druckbegrenzungsventil
Passend für Danfoss OMP und OMR, BMR uvm.

Senkbremsventil
Gleichmäßiges Absenken ohne Stick Slip Effekt