Schwenkantriebe
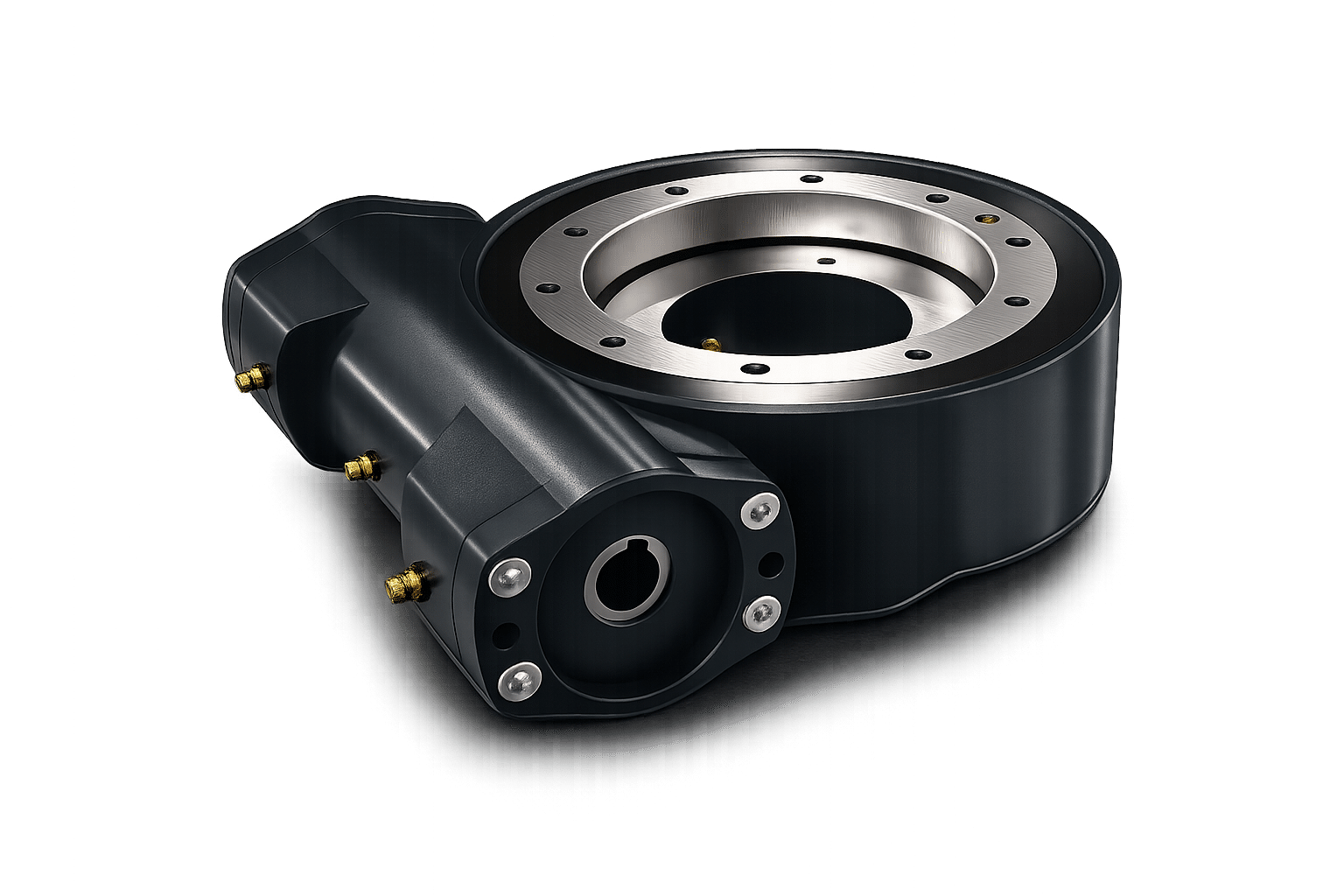
Schwere Baureihe
Robustere Bauweise für z.B. Kräne oder Windkraftanlagen. Besonders für hohe Traglasten und Kippmomente geeignet
Mehr erfahren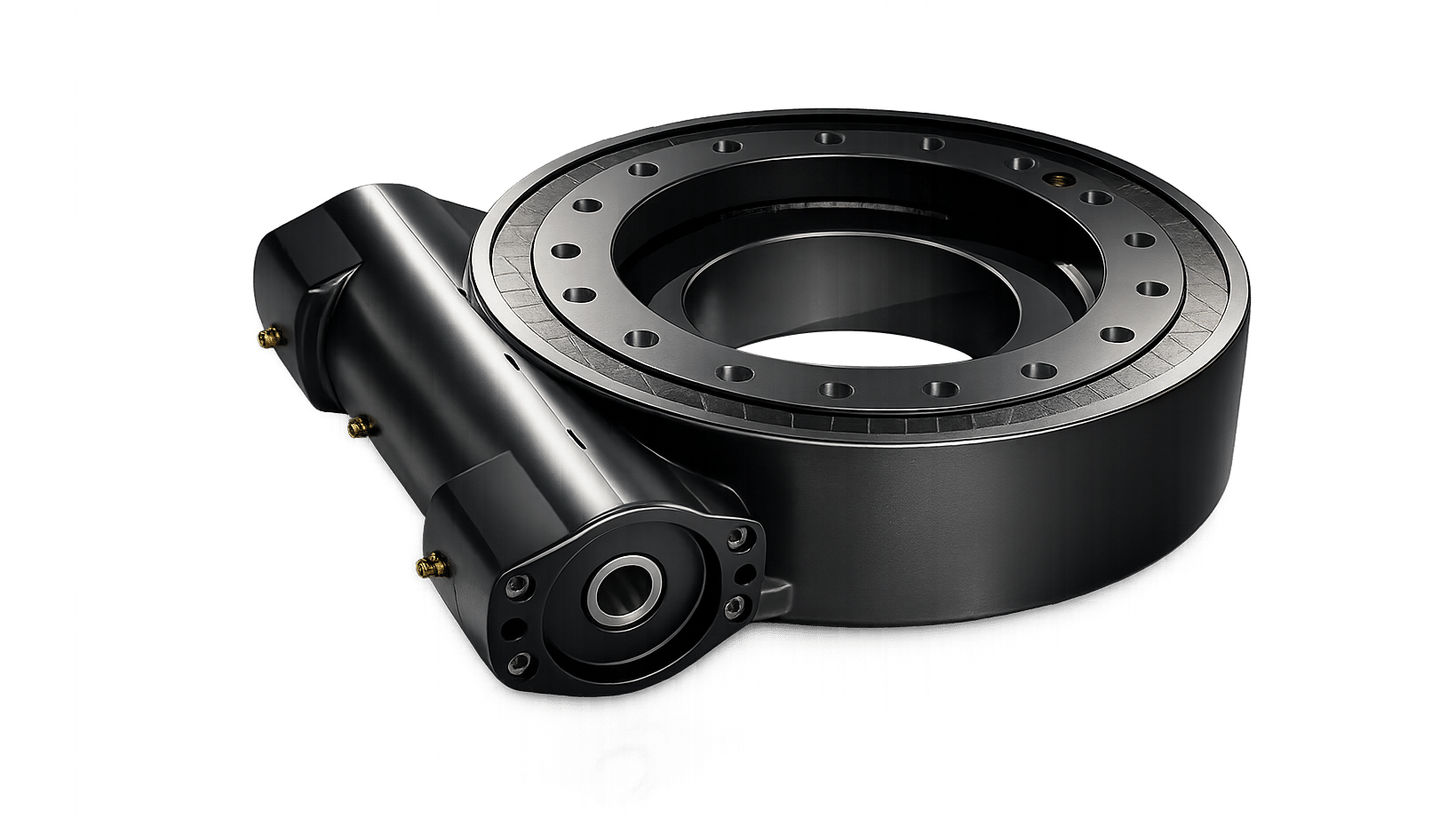
Extreme Baureihe
Für besonders hohe Belastungen und anspruchsvolle Einsatzbedingungen auch im Salznebel
Mehr erfahren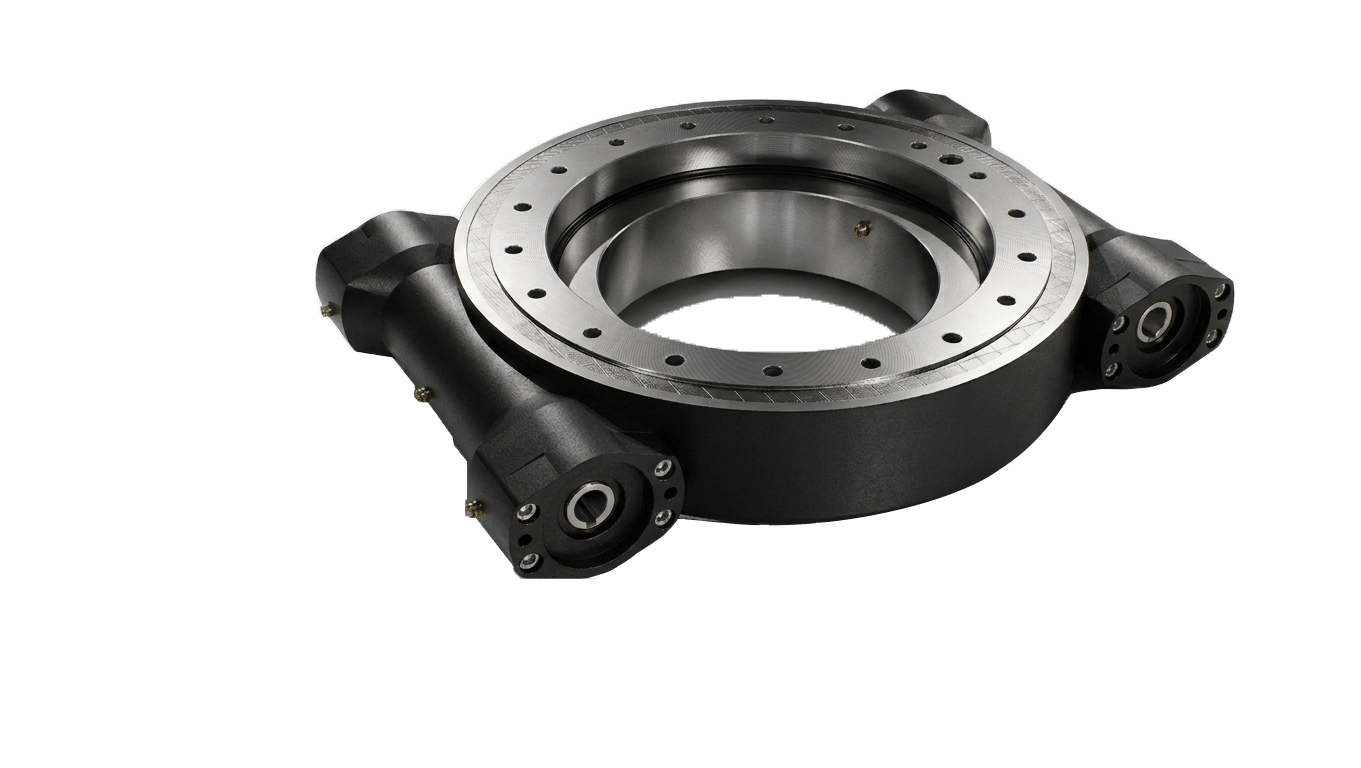
2 Schnecken Baureihe
Doppelte Schneckenwelle für maximale Kraftübertragung und höchste Drehmomente
Mehr erfahren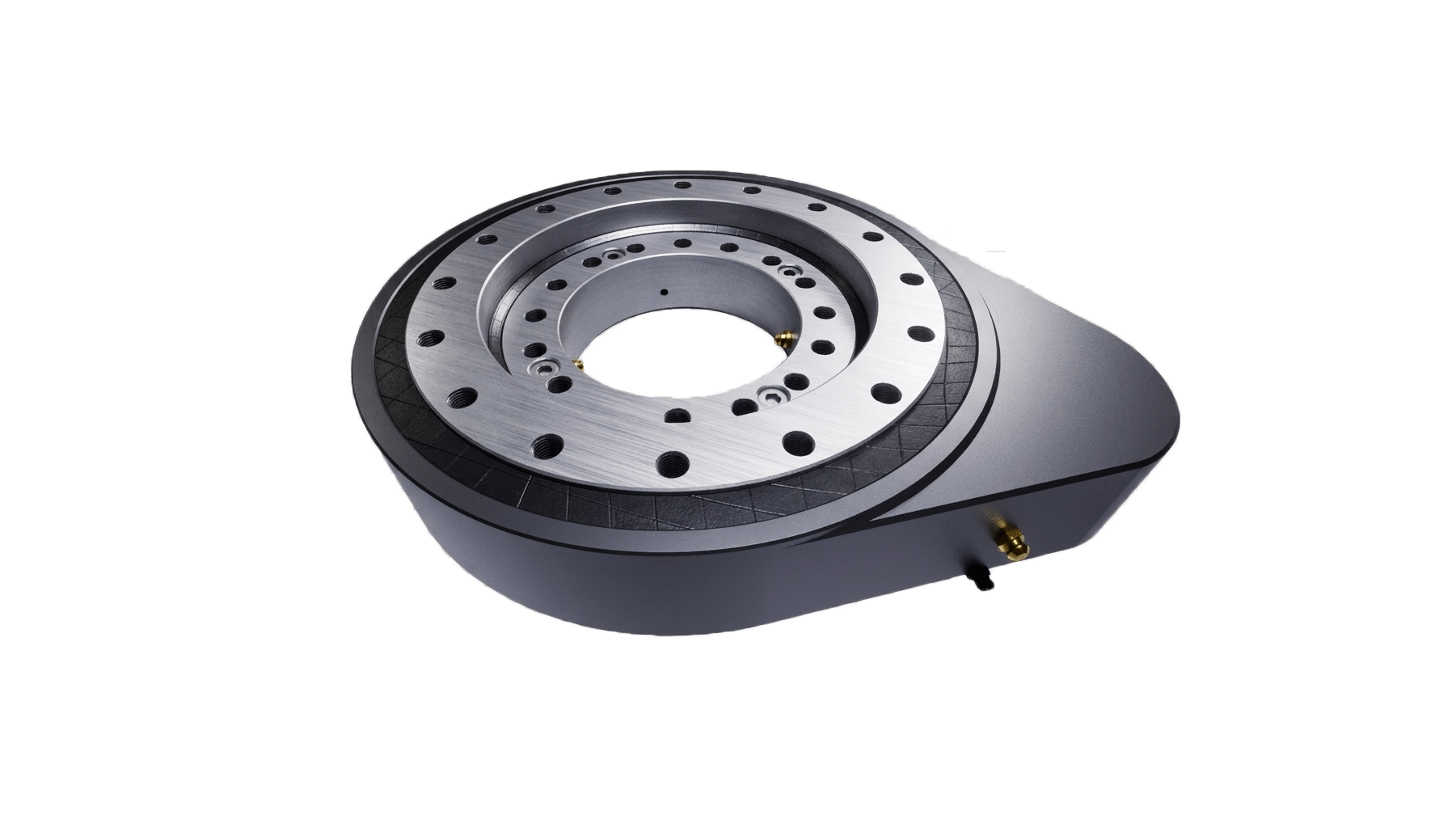
Schnelllaufende Baureihe
Für Anwendungen mit höheren Ausgangsdrehzahlen und dynamischen Bewegungen
Mehr erfahrenKomplettsysteme & Schwenkrotatoren

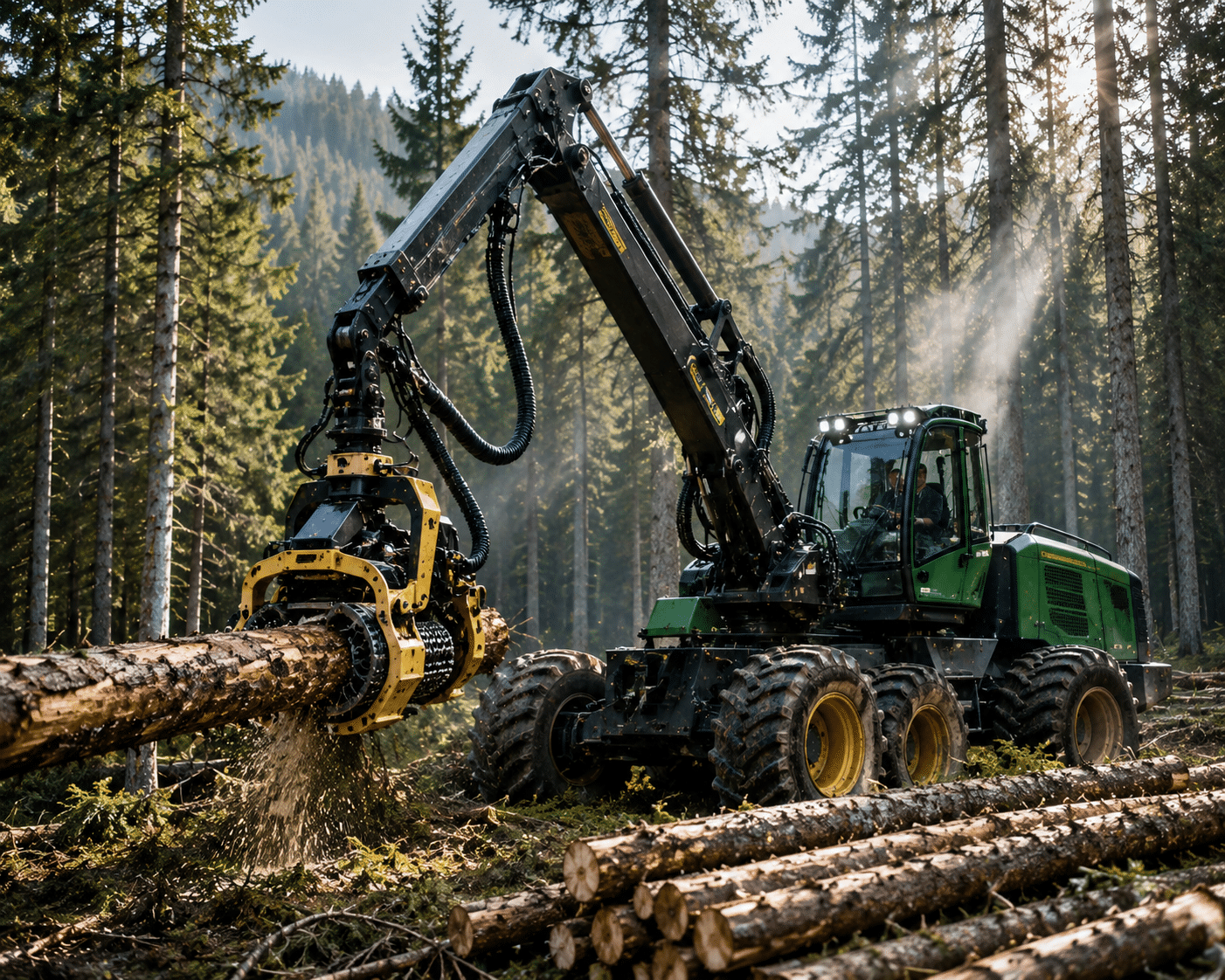
ASR Schwenkrotator
Konfigurierbares Komplettsystem zur 360° Rotation für Bagger bis 60 Tonnen als Direktanbau oder Sandwich Bauweise
Mehr erfahren
24V Motor
Schwenkantriebe mit 24V Gleichstrom Motoren in verschiedenen Ausführungen
Mehr erfahren
24V Solar
Spezielle Baureihe mit geringer Drehzahl zum Einsatz in Solarsystemen. Auf Anfrage auch als Dual Axis Ausführung
Mehr erfahren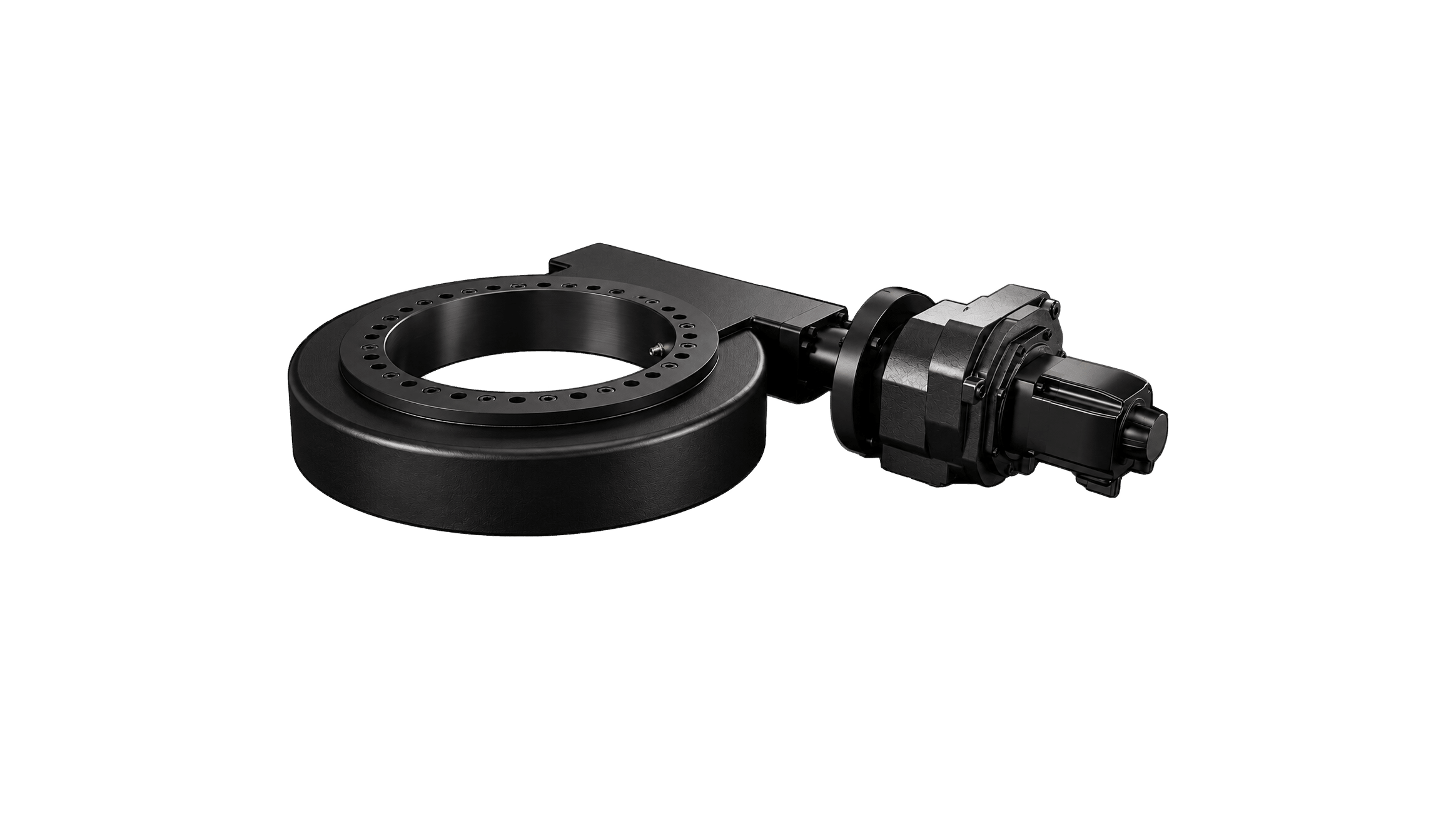
400V Motor
Konfiguration möglich mit 400V Standard Getriebemotoren oder Servomotoren. Optional auch mit Absolutwertgeber
Mehr erfahrenZubehör
Absolutwertgeber
Multiturn Absolutwertgeber für höchste Präzision zur Positionierung
Mehr erfahren
Drehdurchführungen
Medien und Hydraulik sauber durch die Rotationsachse führen.
Mehr erfahren
Druckbegrenzungsventile
Schutz hydraulischer Systeme vor unzulässig hohen Drücken.
Mehr erfahren
Senkbremsventil
Kontrolliertes Halten und Absenken von Lasten in Hydrauliksystemen.
Mehr erfahrenIhr Schwenkrotator. Individuell konfiguriert.
Mit unserem Konfigurator finden Sie in wenigen Schritten die passende Lösung für Ihre Anwendung.